従来のRT-Moverシリーズ
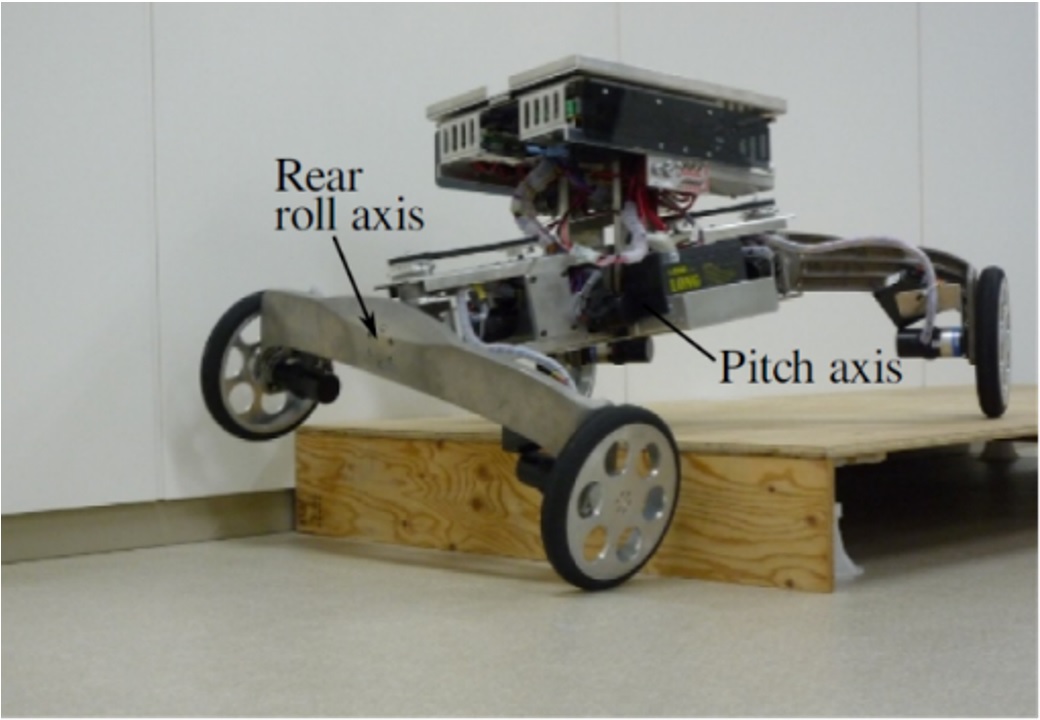
Fig.1は単純な段差をRT-Moverが移動している途中である.左後車輪を脚のように持ち上げるために,残り3つの支持車輪で作る支持多角形に重心が入るように3つの支持車輪の位置を調整していた[paper 5].ただし課題点は,3つの支持車輪の位置をずらすためのスペースが必要であることと,3つの支持車輪の位置の調整で対応できる不整地の範囲が小さいことだった.そこでPType 3ではシート部分を左右にスライドする機構を付加して3つの支持車輪で作る支持多角形内に重心が余裕を持って入るように改良を施した[paper 2].[paper 4]には,各車輪の接地位置高さによって変化する移動可能な不整地の範囲の解析結果を示してある.
課題点
従来のRT-Moverシリーズではサイバスロンで設定された課題路面を移動することは困難である.
1.階段を上る不整地移動能力はない
理由:3段の階段を上る場合,機体が最大で40度弱傾く,加えて階段踏面にある支持車輪の
位置を調整するスペースがないため従来研究の成果では移動が可能である.
2.Ramp and Doorでのドアの開け閉めができない
理由:ドアの開け閉めの際にドアが車輪と干渉し,手が届く範囲を超えることである.
Already proposed RT-Movers' problem
They face difficulty of getting over tasks of cybathlon as follows.- There is no capability of climbing three-step stairs up and down.
Reason: The body tilts at maximum almost 40 degrees when climbing stairs. In addition to that, there is no space to adjust supporting wheels in order to provide enough static stability. Previous research outcome cannot deal with this situation.
- It is difficult to open and close a door at Ramp and Door task.
Reason: A pilot's arm does not reach a handle of the door because wheels interfere with the door when opening and closing.
機体開発における目標(サイバスロン2016)
従来研究では,段差地形に関して「単純段差《を前提に考えていた.本プロジェクトでは対象とする不整地の範囲を「数段の階段《まで拡大する.これが新しい機体開発の大きな目的の一つである.数段の階段の移動が可能になれば,いわゆるバリアフリー関連法で対象にならない個所に残る階段などの不整地も自由に移動できるようになるため,その効果は非常に大きい.
これに加えて,シートに乗ったままドアの開け閉めができるように,あるいは足がテーブルの下に入るようにといった日常生活での活動も可能になるように各部分の可動範囲を拡大する.
そのための主な改良ポイントは以下である.
・搭乗部分の移動方向の追加(左右方向に加えて前後方向)
・搭乗部分の可動範囲の拡大
・機体長の検討
・シンプルな機構による,その場旋回機能の達成
Aim of developing brand-new machine
The brand-new machine must complete all tasks of cybathlon including three-step stairs. That means it wins the gold medal at cybathlon.Major improvements are follows:
- Add an axis to move a seat forward and backward
- Expand a movable area of the seat
- Modify a body length
- Install a new mechanism for pivoting by using a simple mechanism

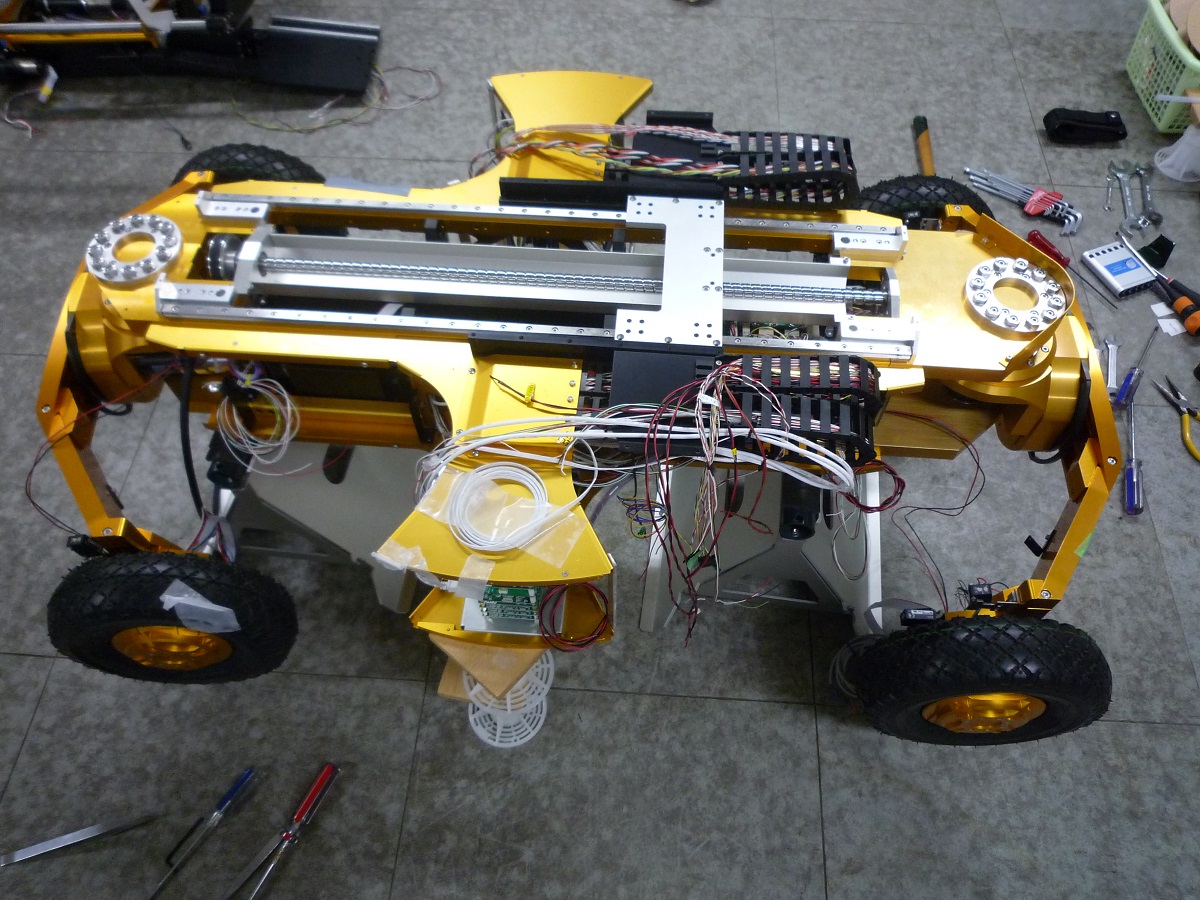
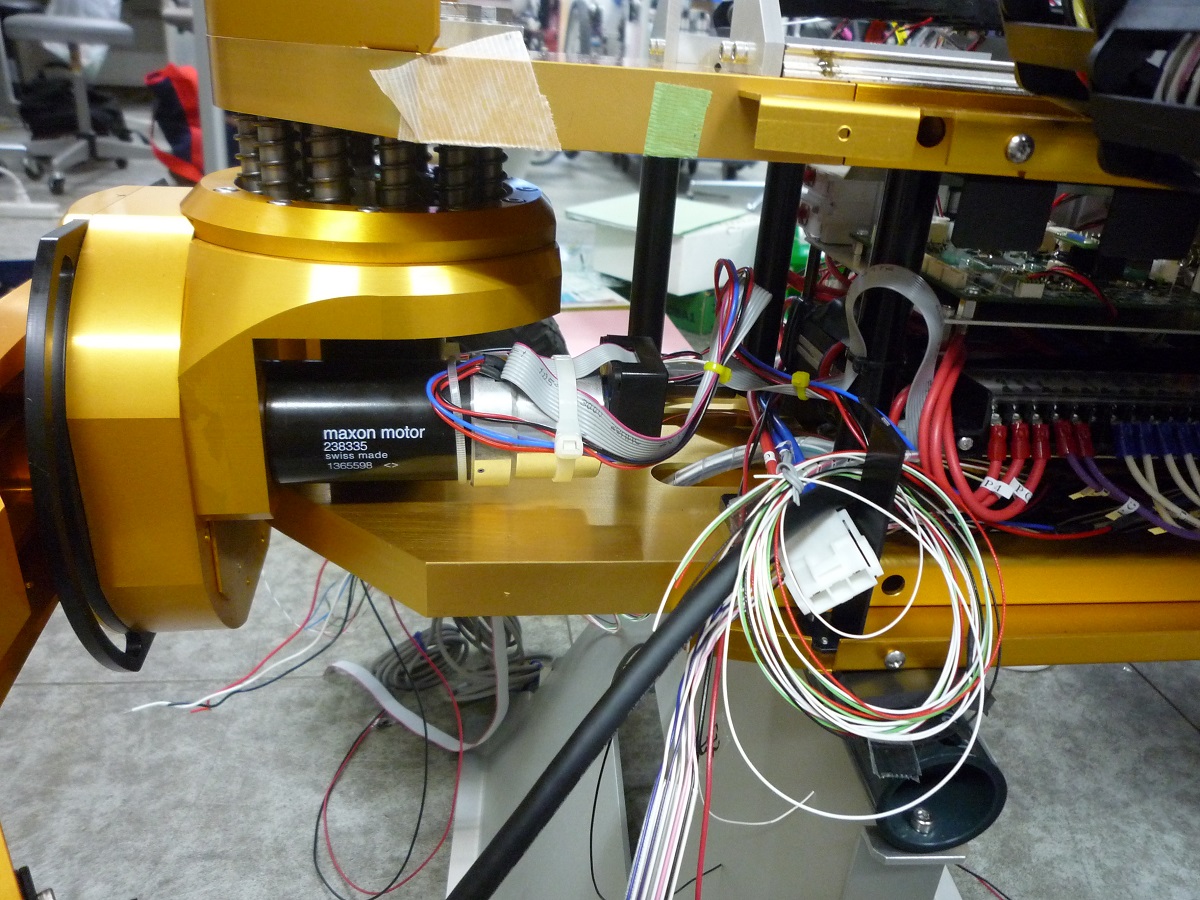
PType WA for Cybathlon 2016(Fig.2)
階段の上り下り機能やシート部の移動機能を加え,さらに機構やシステムを洗練した高機能電動車いすRT-Mover PType WAを新たに開発した(Figs.2 - 4). 機械,電気回路,コンピュータシステム,ソフトウエアすべての項目が我々の開発項目である.
開発した機体の移動性能を評価し論文[paper 6 ? 8]にまとめた.
We are developping the latest version of RT-Mover, named as PType WA (Figs. 2 - 4). All fields such as mechanics, electrical system, computer system, software and control algorithm, are within our works.
The performance of PType WA was evaluated and written in [paper 6] ? [paper 8].






RT-Mover PType WA MK-Ⅱへの進化 (for Cybathlon 2020)
難易度が高くなったサイバスロン2020に対応するため,主に次の機能を新たに付け加え,RT-Mover Pype WA MK-Ⅱへと進化した.
・連続的な階段を上り下りする移動制御アルゴリズム
・ドアの開け閉めをできるロボットアーム
・すべてのタスク動作の高速化アルゴリズム
The followings are main improvements for Cybathlon 2020 in which the level of tasks become more difficult than Cybathlon 2016:
-motoin algorithm for climbing up and down stairs,
-robotic algorithm for opeing and closing a door,
-speedy and stable motion algorithms for all tasks.
Now, we call the new machine as RT-Mover PType WA MK-Ⅱ.
いくつかの機能については,新たに特許[patent 4, 5]として申請中である.
Some new techniques are now applied for [patent 4, 5].
Reference
[paper 1] 中嶋秀朗,近藤拓真,“不整地移動プラットフォームRT-Moverシリーズの設計指針”,設計工学,vol.47, no.9, pp.423-432, 2012.
[paper 2] Shuro Nakajima,“Proposal of a personal mobility vehicle capable of traversing rough terrain,”Disability and Rehabilitation: Assistive Technology, vol.9, no.3, pp.248-259, 2014.
[paper 3] Shuro Nakajima,“Gait algorithm of personal mobility vehicle for negotiating obstacles,”Disability and Rehabilitation: Assistive Technology, vol.9, no.2, pp.151-163, 2014.
[paper 4] Shuro Nakajima,“Improved Gait Algorithm and Mobility Performance of RT-Mover Type Personal Mobility Vehicle,”IEEE Access, vol.2, no.1, pp.26-39, 2014.
[paper 5] Shuro Nakajima,“RT-Mover: a rough terrain mobile robot with a simple leg-wheel hybrid mechanism,”The International Journal of Robotics Research, vol.30 Issue 13, pp.1609-1626, 2011.
[paper 6] Shuro Nakajima, “A New Personal Mobility Vehicle for Daily Life: Improvements on a New RT-Mover that Enable Greater Mobility are Showcased at the Cybathlon,” IEEE Robotics and Automation Magazine, vol.24, issue 4, pp.37-48, 2017.
[paper 7] 中嶋秀朗,“国際競技会サイバスロンを通じた移動プラットフォームの移動性能確認と4位入賞からの知見”,日本ロボット学会誌,vol.35, no.10, pp.739-749, 2017.
[paper 8] Shuro Nakajima, “Evaluation of the Mobility Performance of a Personal Mobility Vehicle for Steps,” IEEE Access, Vol.5, No. 1, pp.9748-9756, 2017.
[patent 1] Japanese patent no.5561744. 中嶋秀朗,家富和寿,“(吊称)車,(内容)車輪型不整地移動ロボットの脚動作アルゴリズムの安定性向上動作に関する特許”,特許第5578738号,2014年7月18日.
[patent 2] Japanere patent no.5561744. 中嶋秀朗,家富和寿,“(吊称)車,(内容)車輪型上整地移動ロボットの脚動作アルゴリズムに関する特許”,特許第5561744号,2014年6月20日.
[patent 3] Japanese patent no.5105528. 中嶋秀朗,“(吊称)車,(内容)車輪型不整地移動ロボットの特徴的な機構を活かした移動方法に関する特許”,特許第5105528号,2012年10月12日.
[patent 4] 中嶋秀朗,“(名称)移動体の段差移動制御方法,(内容)移動プラットフォームの姿勢制御及び段差移動制御技術に関する特許”,特願2018-092958,2018年5月14日.
[patent 5] 中嶋秀朗,“(名称)四車輪型移動体の階段移動方法,(内容)四車輪型の移動体が階段を移動するための手法に関する特許”(申請手続き中のため後日更新)
[press 1] REUTERS WEB NEWS, Oct.23, 2012. (ロイター通信ホームページ,動画ニュース,2012年10月23日掲載)
(http://jp.reuters.com/video/2012/10/23/japanese-scientist-gets-leg-up-on-wheelc?videoId=238623600)
“Robotic wheelchair from Chiba Tech turns wheels into legs and climbs over steps”,
(https://www.youtube.com/watch?v=t2SHKyq5yCU)
Copyright © 2020 Wakayama Univercity Cybathlon Project. All Rights Reserved.
![]()