サイバスロンプロジェクトの目的
現在,日本の人口の四人に一人程度が65歳以上の高齢者であり,世界の国々でも高齢化が進展している.今後の高齢社会においては,電動車いすに代表される移動支援機器の必要性が非常に高い.しかしながら,入手可能な移動支援機器の段差や階段など不整地に対する移動能力は高くないのが現状である.
本プロジェクトの目的は,車のような四車輪型を発展させた新しい移動支援機器を開発することである.そのために,段差や数段の階段も移動可能にする機構,ロボティクスシステム,移動アルゴリズムを新たに提案する.四車輪型とする理由は,日常生活の主な移動環境である舗装路面での移動効率性,高速性,安定性を重視するからである.
サイバスロンに出場する意義は,我々の技術を世界に向けて発信した上で,国際的な評価や連携の機会を得ることである.大学の研究と実用化をつなぐ貴重なステージだと認識している.
Cybathlon Project at Wakayama university
Personal mobility vehicle for all people is useful and necessary in near future. We understand that cybathlon is the stage for connecting between laboratory research and commercial products.
サイバスロン(Cybathlon)とは
最先端の技術を駆使して開発された義手,義足,電動車いすなどを用いて,障害を持った競技者が競い合う大会である.2016年10月にスイスで第一回大会が開かれた.決められたコースで正確性や速さを競う.企画の中心は世界的に有名なETH Zurichである.
What is Cybathlon?
First Cybathlon was held on 8th October 2016, at Swiss Arena Kloten, Zurich, Switzerland.Second Cybathlon will be held on May 2020.
The Cybathlon is a championship for pilots with disabilities who are using advanced assistive devices including robotic technologies. The competitions are comprised of different disciplines that will test the ability of pilots to navigate a series of everyday tasks while using a powered knee prosthesis, wearable arm prosthesis, powered exoskeleton, powered wheelchair, electrically stimulated muscles and novel brain-computer interfaces.
(from web page of cybathlon)

サイバスロン出場の意義
・実際のユーザが搭乗するという実用フェーズを意識した国際大会での評価を経ることで,より質の高い研究開発につなげる.・大学での研究フェーズと実用化の開発フェーズをつなげる機会を獲得する.
・世界でのネットワークを構築する.
・開発スケジュールが明確であり,効率的な移動支援プラットフォームの開発につなげる.
Reason for participating to cybathlon
-Progress our research phase forward by evaluating of the pilot with disability.-Get an opportunity of connecting between lab research and consumer products.
-Build our network for research and development in the world
-Shorten the schedule of research and development by targeting to cybathlon.
電動車いす部門紹介
○日常生活において移動に困難を伴う場面を切り出してコースが設定されている
○予選と本戦で競い合う
Cybathlon Rules 2020-11-03版
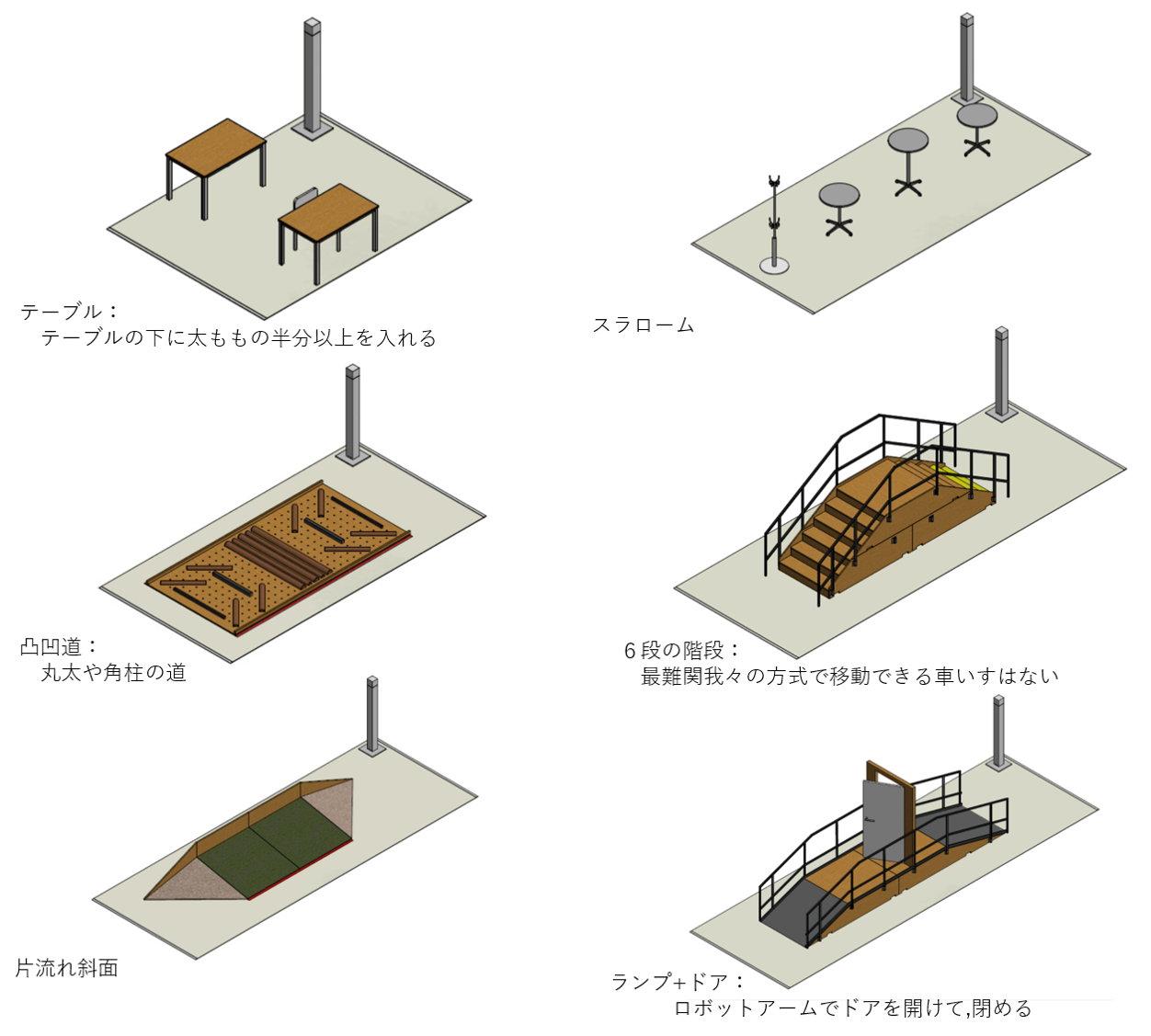
障害物コース:テーブル,スラローム,凸凹道, 階段, 片流れスロープ,ランプ+ドア の6種類
予選:各障害物コースを完走できるか(Fig.1)
各障害物コースの得点(Fig.2)
本戦:予選でのすべての障害物を連続で走行し,タイムトライアル(制限時間8分)
Powered wheelchair race
For people who use a wheelchair on a daily basis, tasks of everyday life can often be a struggle. Entering a building without step free entrances, uneven pavements and steep slopes can massively impact on someone’s day-to-day routines. The Cybathlon encourages teams to come up with inventive solutions to cope these challenges, i.e. that make travel possible not only safely, but also comfortably, reliably and with easy control mechanisms.
Pilots with different disability levels (e.g. tetraplegics, paraplegics, amputees) are equipped with powered wheelchairs and are asked to solve as many tasks as possible in a limited time. Most tasks represent activities of daily life.
(from web page of cybathlon)
Figure 1 shows those tasks and the score of each task is in Figure 2.

市販されている電動車いす
不整地移動能力を備えた電動車いすは長く研究開発がなされ市販もされている.市販されているものには,大型の駆動車輪を中央左右に配置し,前後に2輪ずつ小さな車輪を配置する6輪タイプのものや(Fig.3),大型の4輪タイプのもの(Fig.4),左右に車輪がついた車軸を2本備え,車輪のついた車軸が公転することで交互に2車輪ずつ接地し階段の地形を移動するタイプのもの(Fig.5), クローラ方式のもの(Fig.6)などさまざまな形式のものがある.
(画像は各製品に関するweb pageから転載)
Wheelchair products that are commercially available
Of course, there are many commercial powered wheelchair products for rough terrain. For examples, big center wheels and small wheels at its front and back (Fig.3), big four-wheel type (Fig.4), iBot type (Fig.5) and crawler type (Fig.6).But, a certain limitation of mobility performance exists...





RT-Mover PTypeシリーズ(Fig.7)のコンセプト
従来の電動車いすは,左右の車輪が対になり高さ方向が固定されているため,段差に斜めに入る場合や片側ずつ段差が発生する場合に左右方向の傾きが大きくなり移動性能が著しく減少してしまう.その一方で提案するRT-Moverシリーズは,4つの車輪が独立して段差に対応可能であり,段差に対して正面から移動しなくても,あるいは,左右ばらばらに段差地形が存在しても移動可能である.
また,不整地移動能力が高いと言われるFig.6のようなクローラ方式は,原理的に路面との接触面積が車輪方式よりも大きく,かつ,クローラ自体の回転により,エネルギ効率や高速性能の面で車輪方式に劣る.
我々がターゲットとする移動環境は,特殊な環境ではなく日常環境であり, パーソナルモビリティで移動する環境の大部分を占めるのは舗装路面である.主な移動環境での速度,エネルギ面での移動効率を最大化することが重要であり, 車輪方式での実現を目指したのがRT-Moverシリーズである.
Concept of a series of RT-Mover
Some types of conventional powered wheelchair can climb a step up and down from the front, but are not good at going a step up and down with a certain angle. When they climb a step with an angle, their body tilt and sometimes fall down.
On the other hand, each wheel of RT-Mover is independent, therefore, RT-Mover can climb a step up and down with an angle.
The reason why we choose a wheel mechanism rather than a clawler mechanism is energy efficiency and capability of high speed on our targeted environment.
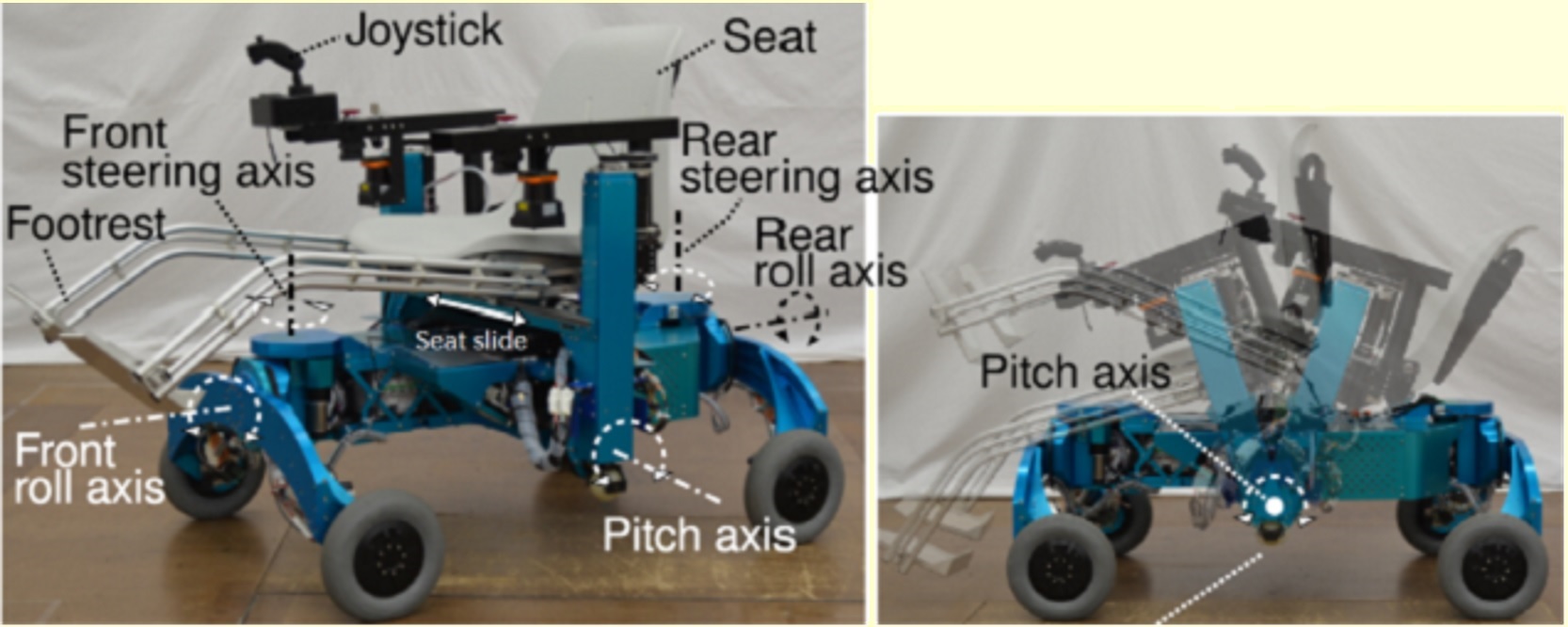
Fig.7 RT-Mover PType 3
*本サイトは cybathlon web site から一部の画像を転載しています
Source of some pictures: cybathlon web site
Copyright © 2020 Wakayama Univercity Cybathlon Project. All Rights Reserved.
![]()