RT-Moverシリーズの概要
車輪移動と脚移動には以下の特徴がある.
車輪移動:クローラや脚よりも高いエネルギ効率での高速移動
脚移動:路面との離散接地に起因する高い不整地移動能力
日常生活環境は舗装路面が主体であるが,段差や数段の階段,斜面などの不整地が散在する.使用場所での移動効率(エネルギ性能,高速性能)を重視した上で,十分な移動能力を実現させたのがRT-Moverシリーズである.
【コンセプト】
「通常は車輪移動」+「必要に応じて脚移動」
= "RT-Mover Gait Algorithm"
Introduction of a series of RT-Mover
The development concept for RT-Movers centres on efficient wheel transport over paved surfaces and other gentle terrain but also envisions a need to negotiate rough terrain.Two major mechanism for moving are a wheel mechanism and a leg mechanism. Each mechanism has the following features;
-Wheel mechanism: good energy efficiency rather than crawler or leg mechanism
-Leg mechanism: high mobility performance on rough terrain
[Concept of gait algorithm]
"Wheel mode, normally" + "Leg motion, if necessary"
= "RT-Mover Gait Algorithm"
[Papers and patents on RT-Mover are at the bottom of the page.]Performance of RT-Mover PType 3
【RT-Moverシリーズに関する論文や特許】
[paper 5](ページ下参照)はRT-Moverの機構や移動原理を提案した論文である.[paper 2 - 4]はRT-Moverシリーズの搭乗型版PTypeに関するものである.機体開発,歩容生成アルゴリズム,不整地路面適応範囲分析などの観点でまとめ, IEEEほか海外の学術雑誌に掲載.[paper 1]は,用途に応じたRT-Moverの設計指針に関する論文であり,設計工学会から論文賞を受賞.[patent 1 - 3]は移動方式に関する取得済み特許である.独特な移動方式で車いすのような移動体が段差を移動することから社会的な反応も強く, 多くのメディアからその研究成果について取材を受け,また報道がなされた(例:[press 1,2]).
その後,PType WAを新規開発し,研究を進め,cybathlon 2016に出場した.学術的にも研究は評価され,例えば[paper 6] ? [paper 8]にその成果を発表した.
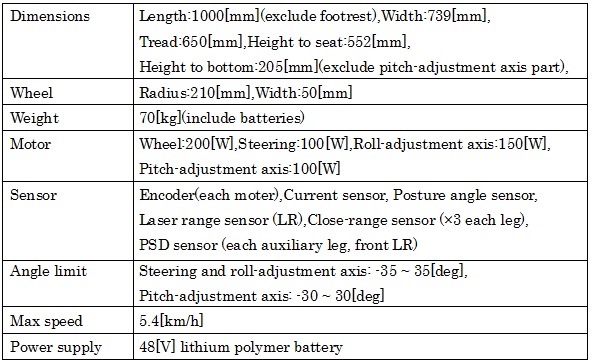
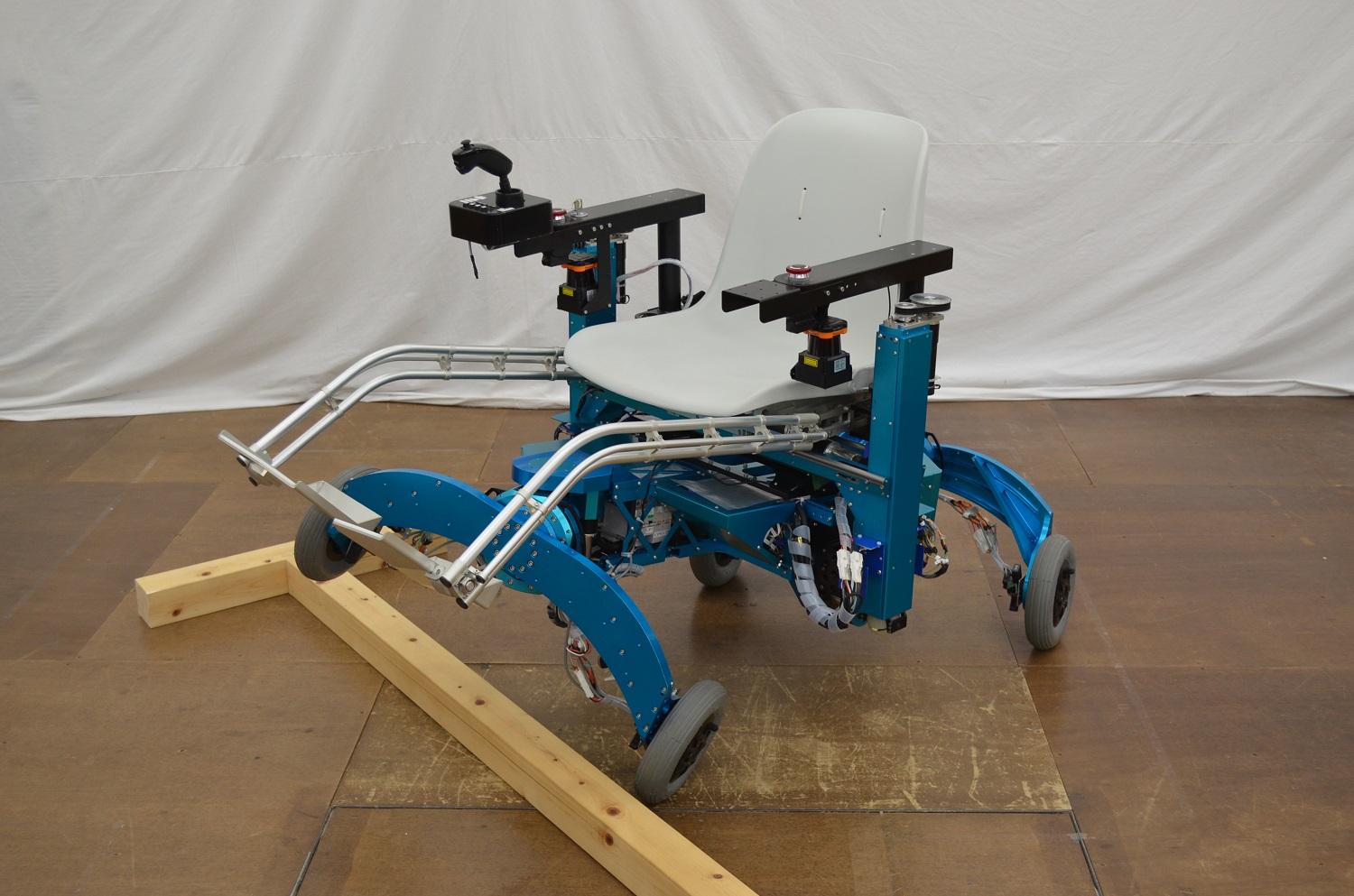
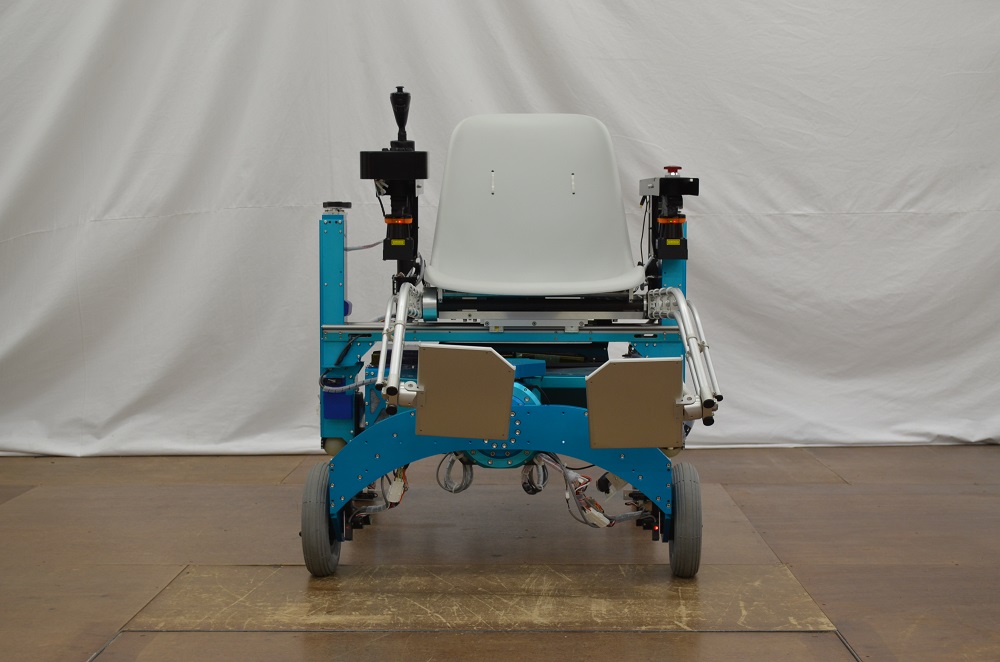
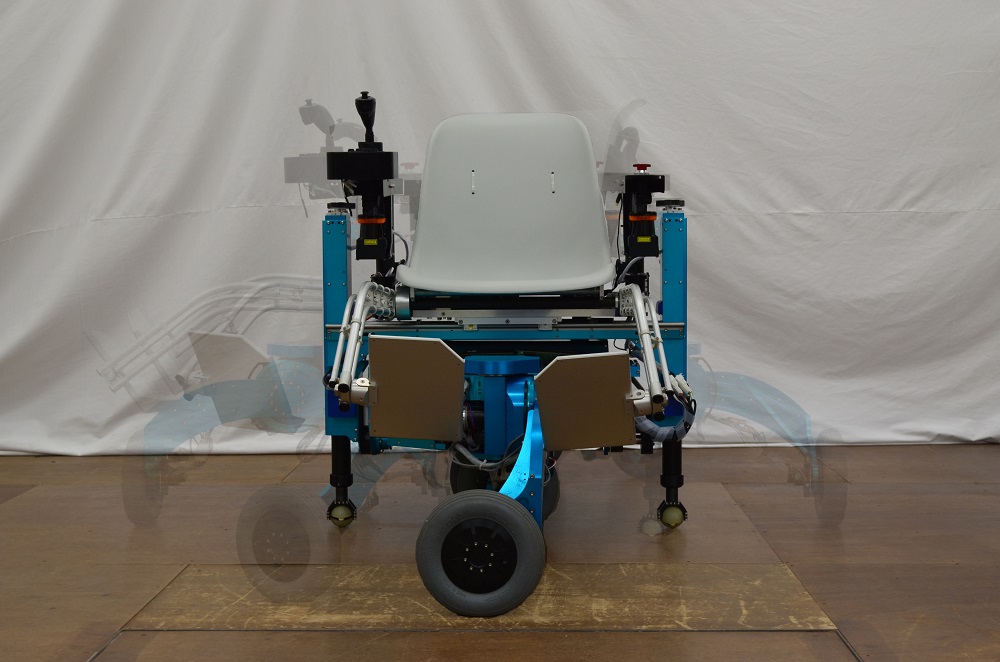
RT-Mover PType 3
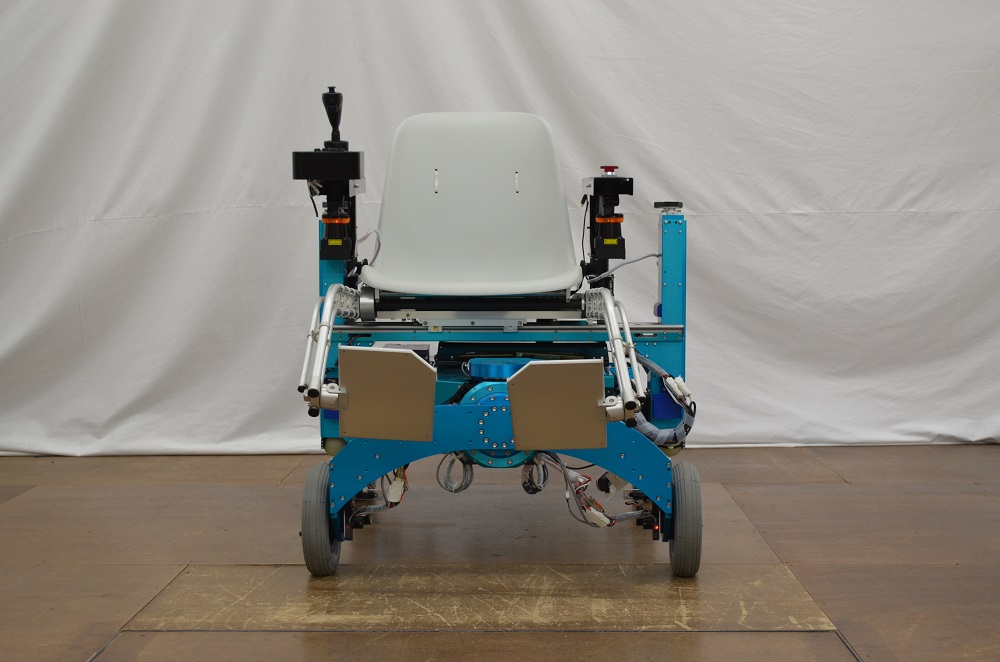
基本仕様 Basic specifications
・電動車いすのJIS規格(JIS T9203)に準拠したサイズでMaximum speed: 5.4km
・常にシート部分を水平に保った不整地移動が可能
Capability of moving on rough terrain with maintaining its seat horizontally
・脚運動や跨ぎ動作には,ロール軸とステアリング軸から成る「櫂機構」を採用
Leg motion is realized by using its rolling and steering axis of wheel axle.
・総駆動数は13
Total active shafts:13 (active wheels:4, front and rear steerings:2, front and rear roll axes:2, pitch axis:1, seat sliding:1, auxiliary legs:2, footrest:1)
移動モード Moving mode
1.車輪移動 Wheel mode
2.その場旋回 Pivoting
3.脚動作 Leg motion
【安全性向上のための付加機能】 [Additional function for safety]・シートスライド機構:重心移動 Seat sliding
・補助脚機構:支持脚の増加 Auxiliary leg



既存電動カートとPType 3との比較
Comparison between conventional vehicle and PType 3
横断スロープ走行
Traverse on slope
障害物への対応
Getting over an obstacle
段差の上り下り(正面から)
Climb a step up and down from the front
段差の上り下り(斜めから)
Climb a step up and down with an angle
Reference
[paper 1] 中嶋秀朗,近藤拓真,“不整地移動プラットフォームRT-Moverシリーズの設計指針”,設計工学,vol.47, no.9, pp.423-432, 2012.
[paper 2] Shuro Nakajima,“Proposal of a personal mobility vehicle capable of traversing rough terrain,”Disability and Rehabilitation: Assistive Technology, vol.9, no.3, pp.248-259, 2014.
[paper 3] Shuro Nakajima,“Gait algorithm of personal mobility vehicle for negotiating obstacles,”Disability and Rehabilitation: Assistive Technology, vol.9, no.2, pp.151-163, 2014.
[paper 4] Shuro Nakajima,“Improved Gait Algorithm and Mobility Performance of RT-Mover Type Personal Mobility Vehicle,”IEEE Access, vol.2, no.1, pp.26-39, 2014.
[paper 5] Shuro Nakajima,“RT-Mover: a rough terrain mobile robot with a simple leg-wheel hybrid mechanism,”The International Journal of Robotics Research, vol.30 Issue 13, pp.1609-1626, 2011.
[paper 6] Shuro Nakajima, “A New Personal Mobility Vehicle for Daily Life: Improvements on a New RT-Mover that Enable Greater Mobility are Showcased at the Cybathlon,” IEEE Robotics and Automation Magazine, vol.24, issue 4, pp.37-48, 2017.
[paper 7] 中嶋秀朗,“国際競技会サイバスロンを通じた移動プラットフォームの移動性能確認と4位入賞からの知見”,日本ロボット学会誌,vol.35, no.10, pp.739-749, 2017.
[paper 8] Shuro Nakajima, “Evaluation of the Mobility Performance of a Personal Mobility Vehicle for Steps,” IEEE Access, Vol.5, No. 1, pp.9748-9756, 2017.
[patent 1] Japanese patent no.5561744. 中嶋秀朗,家富和寿,“(名称)車,(内容)車輪型不整地移動ロボットの脚動作アルゴリズムの安定性向上動作に関する特許”,特許第5578738号,2014年7月18日.
[patent 2] Japanere patent no.5561744. 中嶋秀朗,家富和寿,“(名称)車,(内容)車輪型不整地移動ロボットの脚動作アルゴリズムに関する特許”,特許第5561744号,2014年6月20日.
[patent 3] Japanese patent no.5105528. 中嶋秀朗,“(名称)車,(内容)車輪型不整地移動ロボットの特徴的な機構を活かした移動方法に関する特許”,特許第5105528号,2012年10月12日.
[press 1] REUTERS WEB NEWS, Oct.23, 2012. (ロイター通信ホームページ,動画ニュース,2012年10月23日掲載)
(http://jp.reuters.com/video/2012/10/23/japanese-scientist-gets-leg-up-on-wheelc?videoId=238623600)
“Robotic wheelchair from Chiba Tech turns wheels into legs and climbs over steps”,
(https://www.youtube.com/watch?v=t2SHKyq5yCU)
Copyright © 2020 Wakayama Univercity Cybathlon Project. All Rights Reserved.
![]()