私たちの研究グループでは、制御のための新しい数学モデルの構築や、最適な構造設計までを含めた、 より広い意味での制御系設計の枠組みの構築を目指して研究を行っています。 研究テーマの詳細は、以下をご覧ください。
ロボットシステムの高機能制御と最適設計
- 指数座標を用いたツリータイプシステムの運動制御と大域的構造設計
従来のロボットは、人間や動物の機構を模倣して作られているものがほとんどです。 それらはある種の解ではありますが、必ずしも最適な構造とは限りません。
私たちの研究グループでは、指数座標と呼ばれる新しい数学表現を用いることで、リンクの長さや重さ(幾何構造)だけでなく、 関節の分岐の仕方や関節の方向(位相構造)までを含めた、大域的な構造設計を行っています。 制御系を組み込み、位相構造まで含めて構造設計を行うところが特徴です。 ロボットマニピュレータはもちろん、車両やヒューマノイドロボットなどの設計も可能です。
左の動画は、物体を操作する多指ハンドの最適設計の例です。 物体の運動に干渉しない指の構造を、最小質量(最も短い総リンク長)で求めています。
- 多指ハンドによる物体の把握・操りの制御
人間は意識することなく器用に物体を操作することが出来ますが、 それをロボットで実現するためには、高度な制御系が必要です。
ロボットによる物体操作を実現するのための制御系が把握・操り制御系ですが、 その制御系は物体を把持した時のみを考慮しているため、 指先を物体に近づけるなどの操作は出来ません。 私たちの研究グループでは、この把持・非把持の運動を、同じ力の空間に分解して制御を行うことで、 両者の状態をシームレスに遷移可能な制御系の提案を行っています。
左の動画は、上記で述べたコントローラを用いて、物体の捕獲~運搬を滑らかに実現している様子です。
柔軟構造物の振動制御
- 二次定数の解析関数としての性質に基づく繰り返し構造系の波動解析・波動制御
柔軟構造物の振動制御は、大型構造物や工場設備、ロボットや車両など、様々な分野で用いられています。
振動制御法の一つとして、波動制御法というものがあります。 この方法は、通常のモード解析法とは異なり、振動を進行波の和として解釈し、 波の反射を抑えることで振動の抑制を行う方法です。 二次定数と呼ばれる伝達関数を数学モデルとすることで、 モデル化誤差の影響を受けにくく、構造物の長さや繰り返し数に依存しない、 コントローラの設計が可能です。
私たちの研究グループでは、様々な対象の離散化モデルとして利用可能な マス・ばね・ダンパ系を対象に、 波動制御法の理論的な枠組みの構築を目指した研究を行っています。
左の動画は、二次元場振動(膜の面外振動)を、波動制御法を用いて制御を行った時の様子です。
- 柔軟構造物のロバスト振動制御
高層建築物や大型構造物の振動は、安全性や居住性に悪影響を与えるため、 制御による対策がしばしば求められます。
構造物の振動特性は、モード解析法でモデル化することができますが、 すべてのモードを正確に求めることは困難です。 そのため、通常、低次の数モードのみをモデル化して制御系の設計を行いますが、 無視した高次モードの影響により、制御系が不安定になることがあります。
私たちの研究グループでは、無視した高次モードの影響を陽に考慮した制御系設計法として、 H∞制御などのロバスト制御法を用いた構成法の検討を行っています。
左の動画は、動吸振器と呼ばれる制振装置用いた振動制御の様子です。
テンセグリティシステムの解析と最適設計
- 結合行列を用いたテンセグリティシステムの統一的モデル表現とシステム解析
テンセグリティは、棒とケーブルを繋いで作る構造物です。 曲げ力が掛からないため棒を細くすることができ、 また、ケーブルの伸縮により展開や変形も可能です。 部材に軸力のみが加わるという点ではトラス構造と似ていますが、 テンセグリティでは、張力のみが掛かる部材をケーブルに置き換ることで、 さらなる軽量化を実現しています。
テンセグリティはたくさんの部材を組み合わせて作るため、その設計には、 組合せの変更を効率的に行うことが出来る数学モデルが必要です。 私たちの研究グループでは、そのような数学モデルの構築と それを利用した構造設計法の開発に取り組んでいます。
左の動画は、基本ユニットから構成される構造物を加振し、 その動的な応答を確認している様子です。
- テンセグリティメタマテリアルの最適設計
メタマテリアルは、自然界の物質には無い振る舞いをする人工物質のことです。 そのような材料は、基材に不純物を周期的に配置して作られており、 たくさんのユニットを組み合わせて作るテンセグリティも、 メタマテリアルの構成要素として期待されています。
コンクリートや金属などの通常の稠密部材は、局所的に亀裂や座屈が生じると、 その影響が周囲に伝搬し、それがシステム全体の破損へ繋がることが知られています。 一方、柔軟性のある部材を有するテンセグリティを用いると、 そのような特性を有しない材料を作ることが可能です。
私たちの研究室では、そのような変形の局在化が可能な材料を、 テンセグリティで構成する方法について研究しています。 左の動画は、2種類のテンセグリティメタマテリアルの動特性を評価している様子です。
機能材料のメカトロニクス機器への応用
- 誘電エラストマーによる振動発電のための発電回路の設計
人間の歩行や車両の走行、波浪、風、など、私たちの身の回りには様々な機械振動が発生しています。 この振動エネルギーを電力に変換し、遠隔地にあるセンサなどの電源として利用することが考えられています。
そのような振動発電装置として、誘電エラストマーと呼ばれる高分子材料を用いた発電装置があります。 この発電装置は、誘電エラストマーの静電容量の変化を利用した発電装置で、圧電素子などを用いる場合と異なり、 低周波な機械振動でも発電が可能です。 私たちの研究室では、誘電エラストマー発電装置に必要となる、 電気回路の構成方法について研究を行っています。
左の動画は、誘電エラストマーを伸縮し、その発電量をモニタリングしている様子です。
- 圧電素子を用いたセルフセンシング・アクチュエーション
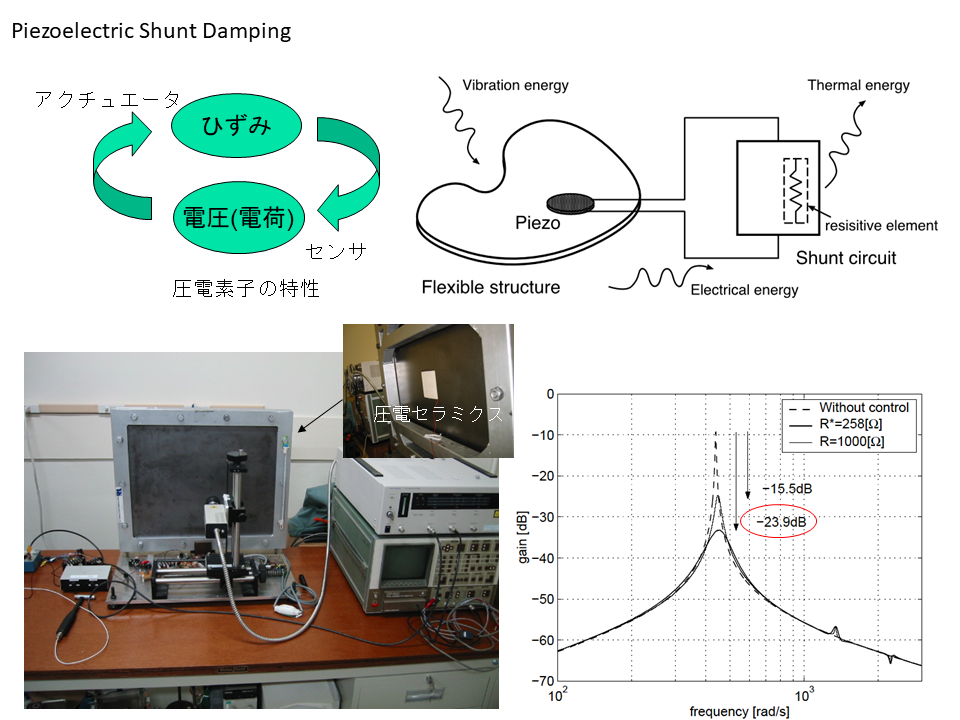
圧電セラミックスや圧電フィルムなどの圧電素子は、 変形すると電圧が発生し、逆に、電圧を加えると変形するため、 材料自体をセンサ・アクチュエータとして利用することが出来ます。
圧電素子の利用法の一つとして、車のパネルなどの板状材の振動抑制があります。 振動制御には、通常、センサとアクチュエータを用意し、 計算機により制御コントローラを実装する必要がありますが、 この方法では、圧電素子を板に貼り付け、簡単な外部回路を取り付けるだけで制振が可能です。 私たちの研究室では、そのようなシャントダンピングのための、電気回路の設計を行っています。
左の図は、シャンとダンピングの概要と、その振動抑制効果を示したものです。