
本クラスタでは、これからの社会に役立つ機械情報システムを創造することを目的として、人工知能、システム制御、計測、ロボティクスなどの分野について先進的な理論と技術を探究します。各技術が複合した統合システムなども研究開発することで、高度な科学技術に対応できる能力を養います。
研究分野

未来社会に役立つ応用情報技術分野に関する研究として新しい乗り物(パーソナルモビリティビークル)を創り出す研究を行っています。機構/システム設計、移動制御、実世界環境認識、自律運転、操縦性/快適性など幅広く取り組んでいます。


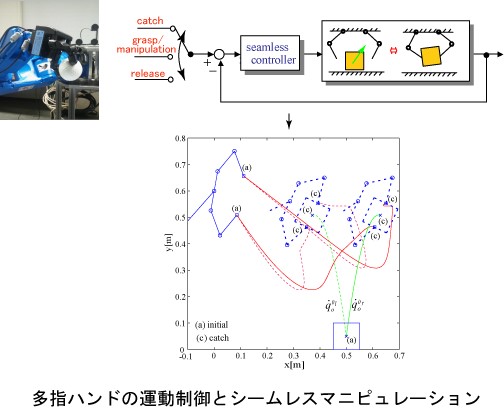
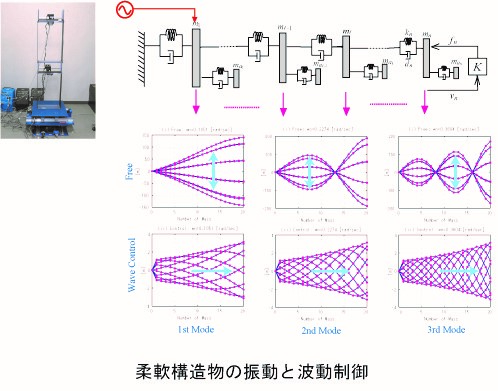
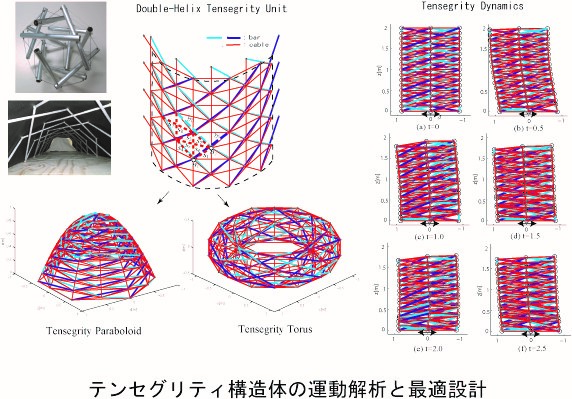
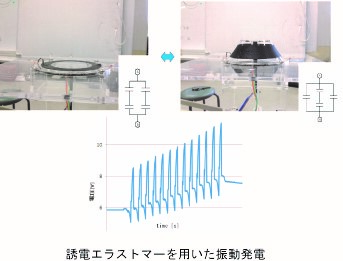
メカトロニクス機器を安全かつ効率的に設計し運用するための、新しい数学モデルの構築や、それに基づく制御系設計、最適化の方法について幅広く研究しています。主に、多指ロボットハンド、柔軟構造物、テンセグリティ構造物、機能材料を組み込んだ機器などを対象に研究しています。
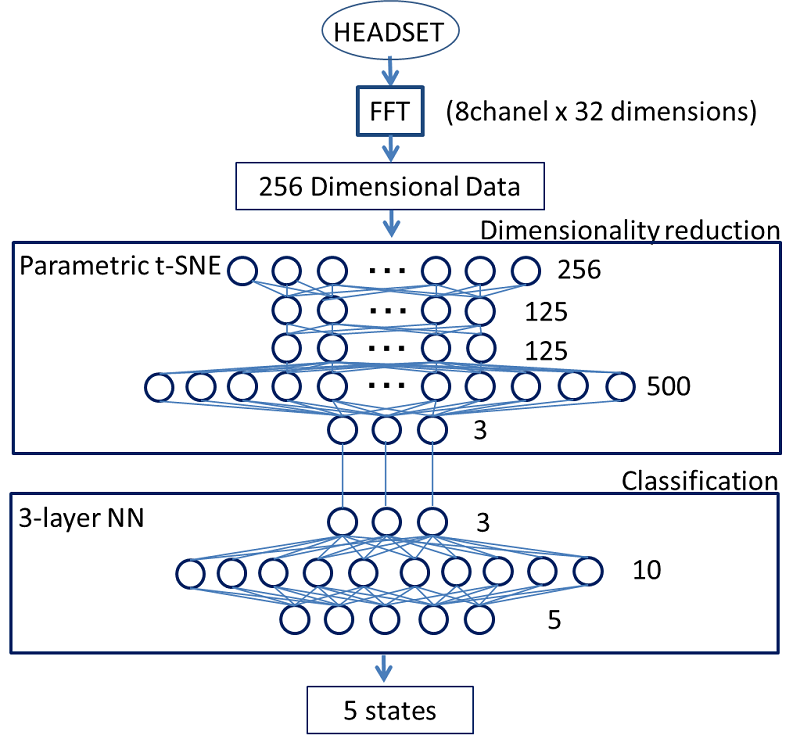
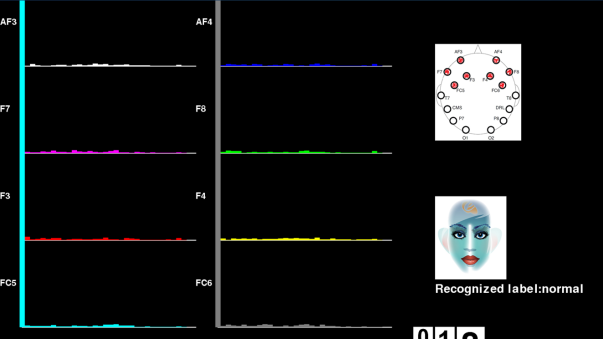
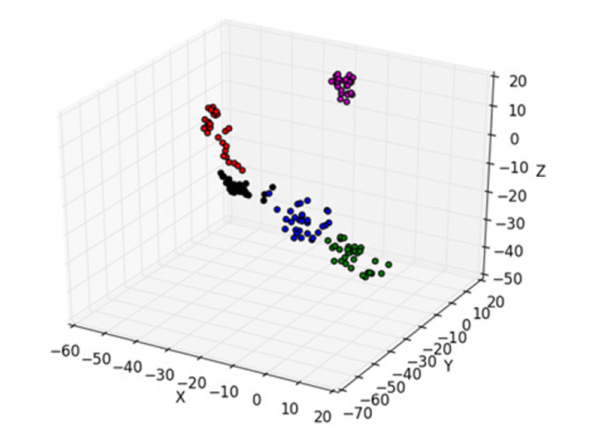
最近、高機能な生体信号取得装置が簡単に入手可能になりました。この装置によって、装置を装着している人の表情や感情、意識など30種以上の状態を計測することができます。これを用いれば、手を使うことなく、搭乗者の表情や意識などによって様々な機器を制御することも可能です。また、高齢者や障害者の方のQOLを向上できます。本研究室では、低価格で装着の容易な生体信号取得装置とDeep Learningなど様々な機械学習法を用いて、ノイズの多く含まれる生体信号からその人の意図を認識するという挑戦的な課題に取り組んでいます。
人間の目では見ることのできない材料内部の可視化、橋梁や送電鉄塔などの大型鋼構造物に加わっているストレス(応力)測定、高機能かつフレキシブルな超音波センサの開発、それに衣服を装着した状態での人体形状計測など、より安全で安心な社会の実現や信頼性の高い製品製造技術の発展に寄与することを主眼に、メカトロニクス計測に関する研究を幅広く行っています。
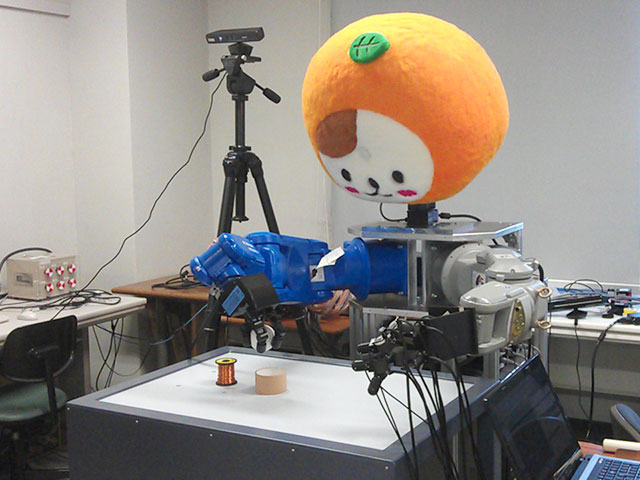
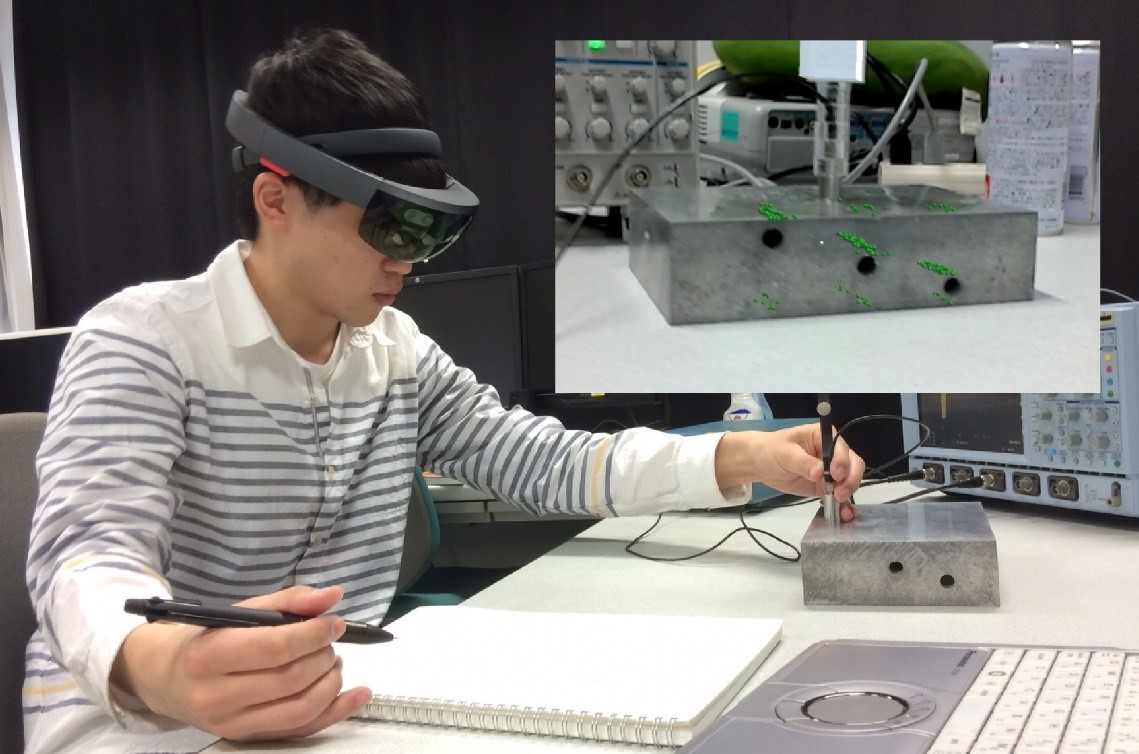
動的に変化する複雑な実世界を対象とした情報処理技術に基づき、ロボットによる組み立て作業の自動化や生活支援ロボットに関する研究を行っています。ロボットの設計・製作、動作学習、遠隔操作、3次元計測、画像認識、機械学習などに取り組んでいます。
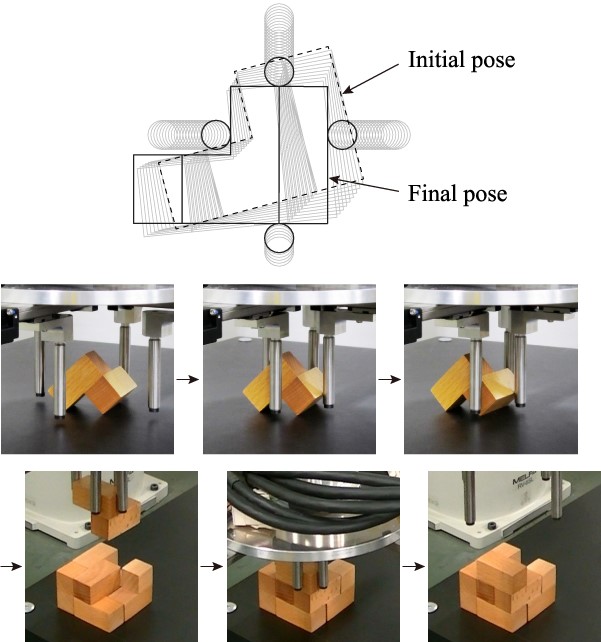
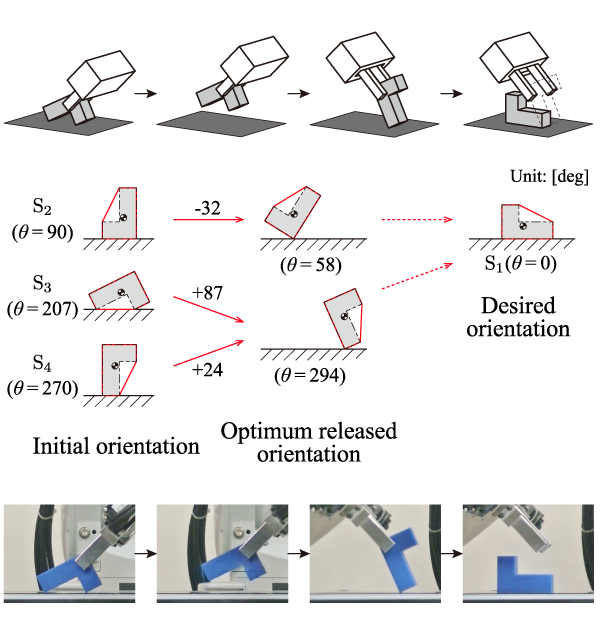
産業(主に製造業)への応用を目指したロボット・マニピュレーション分野に関する研究として、人の手の形にとらわれず、目的の作業に必要な機能の実現を重視したロボットハンドの機構設計・開発や、そうしたロボットハンドで対象物の把持・操作を効果的に達成するための操作戦略の計画などを行っています。
担当教員
| 氏名 | 役職 | キーワード |
|---|---|---|
| 土橋 宏規 (ドバシ ヒロキ) |
教授 | ロボットハンド、マニピュレーション、ロボット生産システム、コンプライアントロボット |
| 中嶋 秀朗 (ナカジマ シュウロウ) |
教授 | 応用情報技術論、ロボティクス、メカトロニクス |
| 長瀬 賢二 (ナガセ ケンジ) |
教授 | システム制御、ロボティクス、振動制御、多指ハンド、テンセグリティ、機能材料 |
| 中村 恭之 (ナカムラ タカユキ) |
教授 | 機械学習、知能ロボット、ロボットビジョン、パターン認識 |
| 村田 頼信 (ムラタ ヨリノブ) |
教授 | 超音波、非破壊計測、高分子強誘電材料、メカトロニクス計測 |
| 小川原 光一 (オガワラ コウイチ) |
准教授 | ロボティクス、コンピュータビジョン、機械学習、動作解析 |
| 丸 典明 (マル ノリアキ) |
准教授 | ロボティクス、ビジョン、人間 |
| 幹 浩文 (ミキ ヒロフミ) |
准教授 | MEMS(Micro Electro Mechanical Systems)、マイクロファブリケーション、ナノマイクロメカニクス、マイクロセンサー |
| 古川 淳一朗 (フルカワ ジュンイチロウ) |
講師 | ロボティクス、Man-Machine interface、外骨格型ロボット、学習制御、動作推定・予測、生体信号、アシスト |
| 王 開 (オウ カイ) |
助教 | 画像処理、深層学習、マルチモーダル学習、パターン認識 |
| 菊地 邦友 (キクチ クニトモ) |
助教 | ソフトアクチュエータ・センサ、ソフトロボティクス、マイクロマシン、微細加工 |





